Team:Oxford/Model/Frequency-Domain-Analysis
Frequency Domain Analysis
Negative feedback and Assumptions
As discussed earlier on the page, both positive and negative feedback could potentially correct the concentration of IL10 in the body. However, it is important to note that body response should be included in the model to give an actual and meaningful prediction of how E.coli would behave if it were in the body. For this purpose, control theory and negative feedback loop have been used by transforming the body and the bacteria in a standard cascade compensation model and deriving their transfer functions. Hence, we developed a cascade compensation model where we have the body as the plant and the bacteria as the controller. Assumptions made for frequency domain analysis are listed below:
- The system has been linearised about an equilibrium point and therefore, it has been assumed that perturbations are small for the Taylor series to converge.
- The reaction pathways are going to be analysed separately as based on superposition, the response of our linearised model would be a sum of its response to inputs separately.
- Secretion has been ignored for simplicity in the transfer function.
Therefore, by using the correct transfer function, both models will fall into the same control design with just different transfer functions. The proposed design for the feedback loop could be seen in Figure [label] .

The aim of the controller is to set the reference signal, namely NO and Adenosine, to nominal level as that would correspond to IL10 having a healthy concentration within the body. Transfer functions for both the controller- both positive and negative pathway- and the body are required for control analysis of system response in a human body.
Transfer Functions
As stated in the assumptions, model has been linearised due to non-linearity raised by the Hill functions and sRNA binding; Hence, Hill functions have been replaced by \(\gamma_i^*\) -described below. The block diagram and signal flow graph for the linearised system are shown in Figure [label] , where transcription of IL10 mRNA, sRNA and translation of IL10 could be seen clearly.
$$ \gamma_i^* = \beta_i \frac{n_iK_i^{n_i}[u_i]^{n_i-1}}{(K_i^{n_i}+u_i^{n_i})^2} $$
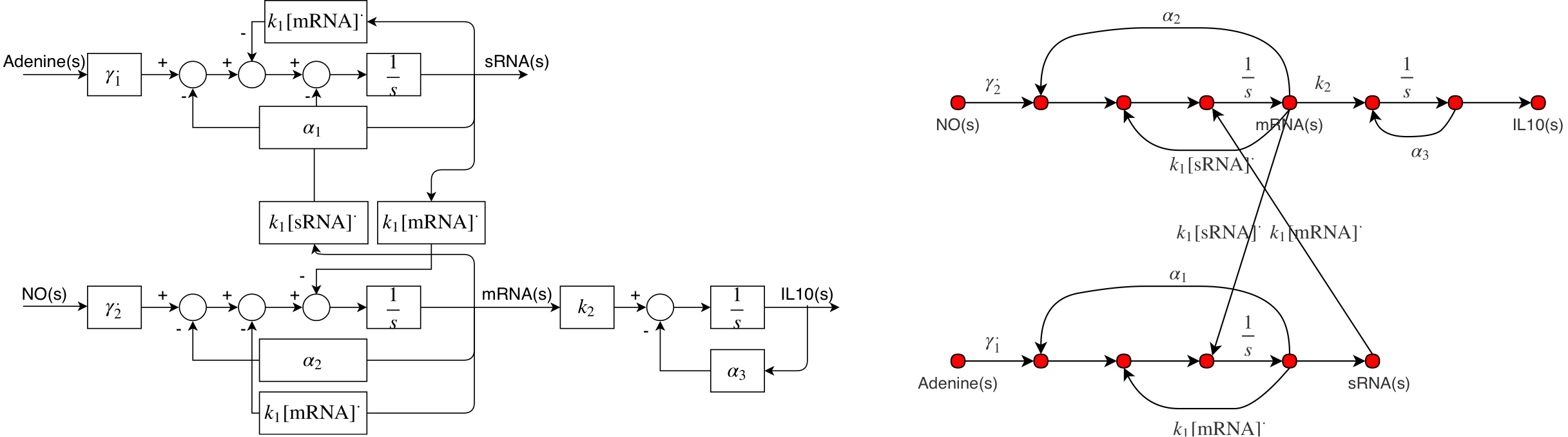
Transfer functions for both negative and positive pathway were found using Mason's gain relation (Bolton &Newnes, 1998) and were double checked against(Steel &Papachristodoulou, 2017) . Transfer functions of both positive and negative pathways could be found below.
$$ G_1(s) = \frac{\text{IL10(s)}}{\text{Adenine(s)}} = \frac{k_2\gamma_1^*(s+\alpha_1+k_1[\text{IL10 mRNA}]^*)}{(s+\alpha_3)(s+s_+)(s+s_-)}, $$ $$ G_2(s) = \frac{\text{IL10(s)}}{NO(s)} = \frac{-k_1[\text{IL10 mRNA}]^*k_2\gamma_2^*}{(s+\alpha_3)(s+s_+)(s+s_-)}, $$
$$s_\pm = \frac{1}{2}(\alpha_2 + k_1[\text{sRNA}]^* + \alpha_1 +k_1[\text{IL10 mRNA}]^*)\pm \frac{1}{2}\sqrt{d},$$ $$d = (\alpha_2 + k_1[\text{sRNA}]^*- \alpha_1-k_1[\text{IL10 mRNA}]^*)^2+4k_1^2[\text{IL10 mRNA}]^*[\text{sRNA}]^*$$
Body response transfer function
Laplace transformed could be taken from both sides of the Equation [label] and by ignoring \(c\), being very small and negligible, we would be able to derive the transfer function for the body as shown below.
$$ s[\text{NO,Adenine(s)}] = -a_i[\text{NO,Adenine(s)}]+b_i[\text{IL10(s)}] \implies F_i(s) =\frac{[\text{NO,Adenine(s)}]}{[\text{IL10(s)}]} = \frac{b_i}{s+a_i} $$
Stability
The closed loop transfer function for cascade cascade con-troller design given in Figure [label] would contain importantinformation regarding steady state error and relative stabil-ity. It should be mentioned that similar to most control prob-lems where the controller is designed for specific specifica-tions (Dorf & H.Bishop, 1998), our reaction pathway couldalso be changed by changing promoter strength and lengthof sRNA, making it almost possible to adopt desired struc-tures for the controller. The closed loop transfer function forpositive and negative pathways is as follow.
$$ T_i(s) = \frac{F_i(s)G_i(s)}{1+F_i(s)G_i(s)} $$
Based on Equation [label], the stability of the system could be found by looking at the location of the poles which are the roots to the characteristic polynomial \(1+Fi(s)Gi(s)=0\). The characteristic equation for Adenine and NO reference signals are given in Equations [label] and [label]. Equations 15 and 16 were solved numerically (Wolfram Alpha online, n.d.) and smallest poles and zeros for both reaction pathways are summarised in the Argand diagram below, Figure 17. All poles and Zeros are summarised after the figure. It should be noted that some poles and zeros were omitted as they were significantly larger than those shown in Figure 17and would have thus hindered comparison with those illustrated. All poles and zeros are given below.
DC Gain and Steady State Error
$$ E(s) = \frac{1}{1+G_i(s)F_i(s)}R(s) \; , \; R(s) = \frac{C}{s} \quad C \in \mathbb{R} $$ $$FVT \, :\quad \lim_{t\rightarrow \infty} e(t) = \lim_{s \rightarrow 0} sE(s)$$ $$\therefore \; \lim_{t \rightarrow \infty} e(t) = \lim_{s\rightarrow 0} \frac{1}{1+G_i(s)F_i(s)} $$
By substituting back Transfer functions for both E. Coli,\(G_i(s)\), and the body,\(F_i(s)\), the steady state error can be found as follows:
- For NO response \(\lim_{t\rightarrow\infty} e(t) =-2.9501^{-4} \).
- For adenine response \(\lim_{t\rightarrow\infty} e(t) = -2.1912{-3} \).
It is evident that the combined model has a very small DC gain and hence, a very small margin of error is estimated for the steady concentration of IL-10.